MTI Journal
MTI Journal.18
Autonomous Ship Project and
Model-Based Approach
Tomoya Yanagihara
Principal Researcher, Maritime and Logistics Technology Group*
*The job title is as of June 15, 2022
I was seconded to MTI in January 2020 and engaged in research on automatic navigation system. At the company I was seconded from, I was involved in the development of systems utilizing information and communication technology, such as the construction of communication networks for ships, data collection devices for navigation equipment, and ship monitoring system from shore, but my knowledge of the maritime industry itself and ship operation and navigation was limited, and so I was not confident that I could provide systems and services that truly met customer requirements. At MTI, while utilizing my past system development experience, with development of automatic navigation system as a theme, I aim to be an engineer who can design appropriate system that capture the essential value of the system, by acquiring the skills to systematically organize “various requirements for system” based on the knowledge of ship operations and ship management.
Embodiment of Autonomous Ships
”People don’t want to buy a quarter-inch drill. They want a quarter-inch hole.*1”
You might have heard this phrase before. It is a famous saying about marketing, expressing that “to sell a product, think in terms of its ‘value’ to the customer.
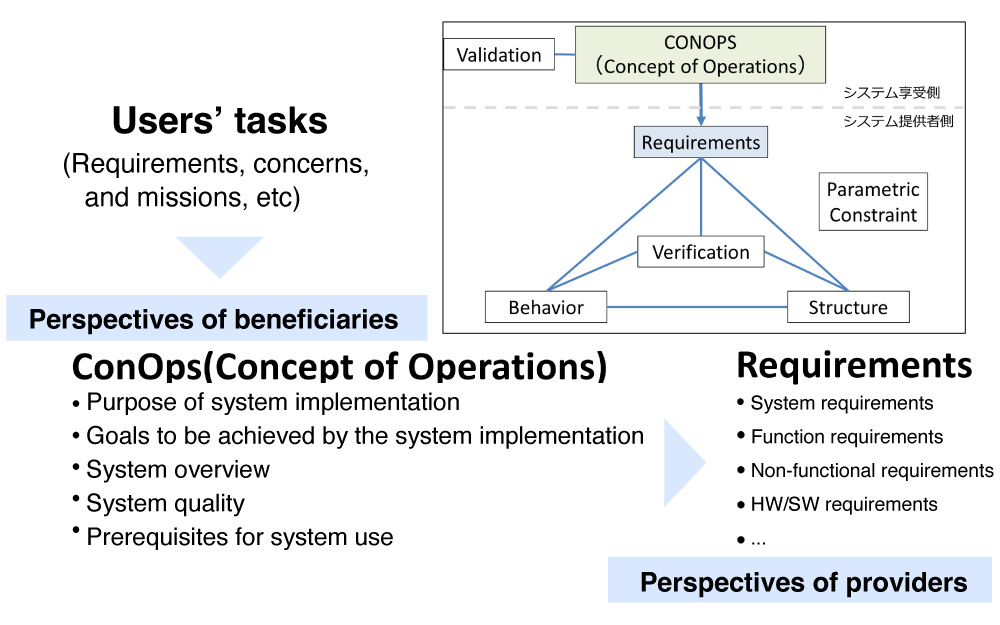
There are various causes of project failure, but in the development of increasingly complex and advanced systems in recent years, it is necessary to correctly understand and analyze requirements in the upstream process of system development, as in the formulation of ConOps (Concept of Operations), which expresses the concept of system use and operation, and the definition of requirements. Insufficient work on these tasks often results in misjudging the value of the system, failing to obtain the correct requirements for the system, and proceeding with the project based on incorrect or excessive requirements. The larger the project or system, the more critical this upstream process, i.e., identifying the intrinsic value of the system, becomes.
From February 2020 to May 2022, MTI participated in the “MEGURI2040” fully autonomous ship project administrated by the Nippon Foundation as a DFFAS consortium*2 with 30 companies in Japan to develop and demonstrate fully autonomous ships, including automated navigation systems. MTI’s role in the consortium was to create a concrete image of fully autonomous ships in the upstream process of developing this system, in a project to realize fully autonomous ships, which everyone may have a different image of.

Coastal containership SUZAKU used for the demonstration test of fully autonomous ship

Fleet Operation Center of fully autonomous ships
Although we had knowledge of automatic operation systems from our previous research, there are many issues that need to be taken care of when it comes to fully autonomous ships, such as system monitoring, means of responding to abnormalities, establishing communication routes between ships and shore, and understanding the operating status of the engine plant. In addition, technologies of the companies that make up the consortium, their objectives for participating in the project, and backgrounds of the individual participants are diverse, and their images and values of autonomous surface ships are also different. With participants lacking a common understanding of the overall system and its necessary functions, it was necessary to define a specific image of fully autonomous ship down to the smallest detail in the early stages of development in order to not only realize autonomous navigation in this project, but also to establish a technology that would be practicable in a few years’ time.
Correct identification and management of requirements
In general, the place where the interests of all stakeholders in a project intersect the most is in the requirements for the system. Requirements have a hierarchical structure, with ConOps at the top, and are then subdivided into requirements at the system overview level (system requirements), requirements for overall system behavior, requirements for system configuration, requirements for individual functions (functional and non-functional requirements), hardware and software requirements to realize these requirements, and so on. The granularity of the requirements becomes finer and finer. ConOps and higher-level requirements are the foundation of system development and project management, so it is important to define these requirements firmly in the upstream process of the project, verify their validity as the project progresses, and make changes as necessary.
The task of defining and managing requirements is very challenging, and there is no magical way that will always work, but on the other hand, there are many frameworks and methods out there that can be applied to this task. MTI tackled this project based on the concept of a model-based approach, incorporating the thinking frameworks, systems analysis methods, and systems description techniques that are practiced in the field of systems development.
Correctly capture requirements that are hierarchical in structure
Model-based approach
Many companies participated in the DFFAS consortium at MEGURI 2040. Therefore, a major challenge in organizing the requirements for the system and the corresponding system configuration and behavior was “to ensure that the project stakeholders had a common understanding of the issues to be discussed and implemented. The “model-based approach” is to try to solve the problem utilizing models.
A model is a simplification of things from one aspect (point of view) to another. Models are to be created with specific purposes, such as to explain things in a way that is easy to understand, or to discuss things with a common understanding or point of view. MTI created numerous models using the APExS-atuo*3 autonomous ship framework developed by the NYK Group, as well as existing system analysis methods and thinking frameworks such as STAMP/STPA*4 and GSN*5, and held discussions with stakeholders to build consensus. What can be very confusing and sometimes ambiguous in words can be clearly and efficiently conveyed by creating and reviewing a model. As they say, a picture is worth a thousand words, indeed.
Example of created models
Anchoring Point during Project Progress
Although the model-based approach enabled efficient consensus building, in the development of a large-scale system such as an unmanned ship, there will naturally be situations in which modifications to the agreed-upon content will be necessary as the project progresses. In doing so, we were able to think about and discuss which requirements (specifications) in question are connected to higher-level/subordinate requirements (hierarchical structure and traceability of requirements), going back to a model that all parties involved had a common understanding of, and were able to measure the scope of impact of such requirements and the scale of impact they have on the fundamental value of the system. This allowed us to proceed with system development efficiently, with the necessary work done as changes in the system requirements and the other parts covered by system operation, minimizing the impact of rework in the limited development period. This is also true for any requirement deficiencies or implementation defects uncovered during the verification and evaluation phase of the system. I was able to see firsthand how strong it is to be able to always return to the model and discuss it.
Thus, by proceeding with the development, verification, and evaluation of the system using a model-based approach, the two-year project progressed as planned. From February 26 to March 1, 2022, the system was used to automatically navigate approximately 790 km between the Port of Tokyo and the Port of Tsu-Matsusaka (Matsusaka City, Mie Prefecture) as a demonstration test for fully autonomous ships.
In front of SUZAKU after the successful demonstration test (front row, center: Mr. Yanagihara)
Toward the Realization of Autonomous Ships
The cornerstone of the model-based approach is to capture the essence of the subject by looking at the subject from a bird’s eye view and from multiple perspectives through logical thinking and hierarchical structuring (controlling the level of abstraction). Although this approach was applied to the development of fully autonomous ships, the cornerstone of this approach can be applied not only to system development and project management, but also to all operations involving decision-making, problem solving, analysis, and strategic planning, such as business planning, procurement, organizational management, and even management itself, and does not change with the times. Therefore, being able to practice the model-based approach through the fully autonomous ship project was a very significant experience for me in considering how to approach my own future work.
In order to realize autonomous ships, or even further fully autonomous ships, there are many issues to be addressed, including not only the advancement of the system, but also the consideration of operational methods, the establishment of laws, the formulation of international standards (regulations), and the certification of each ship class. In all of these issues, discussions and consensus-building with many parties involved must be carried out. In doing so, I would like to utilize the knowledge I have gained through this project to strongly promote the development of the system, and I would also like to be involved in the development of automatic navigation system as an engineer myself. Furthermore, I am committed to doing my utmost to provide not only autonomous navigation system, but also systems and services that will be of real value to the shipping industry in the future.
*1 ”People don’t want to buy a quarter-inch drill. They want a quarter-inch hole.” – By Harvard Business School Professor Theodore Levitt
*2 DFFAS: Designing the Future of Full Autonomous Ship
*3 Press release on March 15, 2022: Fully Autonomous Ship Framework Obtains AiP from Classification Societies ClassNK and Bureau Veritas
*4 STAMP/STPA: System Theoretic Accident Model and Processes/System Theoretic Process Analysis. New safety analysis methodology based on system theory and safety analysis methods based on it
*5 GSN: Goal Structuring Notation. Notation used to visualize the methods and thoughts that guide the achievement of the objectives and properties that the system should achieve.