操縦運動シミュレーション
掲載日:2022年10月3日
自律運航船のシステム開発における操縦運動シミュレーション活用
自動運転のような複雑なシステムの開発では、モデルベース開発(MBD:Model Based Development)が適用されるようになってきています。このMBDの検証フェーズでは、シミュレーション技術が活用されます。シミュレーションにより、開発途中のシステムに何らかの異常や問題を発見した際の手戻りの発生を最小限にとどめ、試作工数やコストを抑えられることが大きなメリットとなります。
自律運航船の開発においても、シミュレーションの活用が有用です。自律船の主要な機能である、避航操船や自動離着桟を実現するための制御系の検証をバーチャルに実施するため、当社では操縦運動シミュレーション技術の開発を進めています。実海域での風・波による外乱が船体運動に与える影響や、水深の影響等を精度良くシミュレーションできれば実船搭載前に制御系の問題点を把握でき、設計の改良に繋がります。また、実船でのテストをできるだけ減らすことにもつながります。DFFASプロジェクトではシミュレーションプラットフォームであるCyberSea*上に船体運動モデルを開発し、制御系と接続して事前検証を実施し、この手法の有効性を確認しました。
船体運動モデルの開発には、一般的には水槽試験やCFDが利用されますが、実船の運航データから効率的にモデル開発を行う手法や、船体運動モデルのパラメータを修正する手法についても研究を進めています。
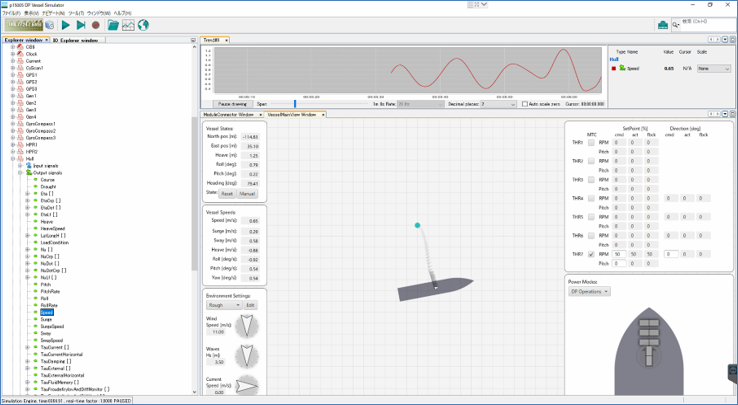
シミュレーションプラットフォーム CyberSea*
(執筆担当:二木 崚佑)
参考文献
* DNV-GL Marine Cybernetics Advisory
関連リンク
Monohakobi Techno Forum 2021講演資料:「DFFASプロジェクトにおける船体運動モデルの開発と活用」二木 崚佑
本件に関するお問い合わせ
お問い合わせは、こちらのメールフォームからご連絡下さい。