センサーシミュレーション
掲載日:2022年10月3日
研究の背景
当社ではシミュレーションを活用したセンサー技術の検証に取り組んでいます。カメラ・レーダー・GPS・LiDARをはじめとした様々な外界センサーの利活用が近年進んでいます。船舶においても様々なセンサーの活用が進められていますが、実船を用いてセンサーの取り付けと検証を行うことは高コストであり、新規に建造する船舶では建造前に実船を用いた検証をすることは困難です。シミュレーション環境を用いることで、実船を用いることなくセンサーの機能・取り付け位置・個数などを検証することで、低コスト化と検証サイクルの短縮が見込めます。
シミュレーションによるLiDAR・カメラの検証
研究事例の一つとして、LiDARとカメラの3Dシミュレーションによる岸壁の認識・距離計測について説明します。本事例ではシミュレーション環境はROSとGazeboというオープンソースソフトウェアを用いて構築されました。ROSはロボット用のOSのようなもので、センサー・制御・認識など複数のソフトウェア間の通信やデータ連携を行うことができます。GazeboはROSと組み合わせることができる物理エンジンで、これによりロボットのモデルと他の物体との干渉・認識などをシミュレーションすることができます。
このROSとGazebo上で、簡易的な岸壁と船舶モデルを持つシミュレーション環境を構築しました。船舶モデルには正弦波で簡単な縦揺れを追加しており、LiDAR・カメラのセンサーモデルを搭載しています。センサーモデルはシミュレーター標準のモデルや、第三者が公開するパッケージなどを用いて実現されており、それぞれ視野角やデータ取得周期、有効視野などが実在の製品に合わせて設定されています。これらのモデルを用いてシミュレーターにおけるLiDAR、カメラそれぞれを検証します。
*https://bitbucket.org/DataspeedInc/velodyne_simulator/src/master/
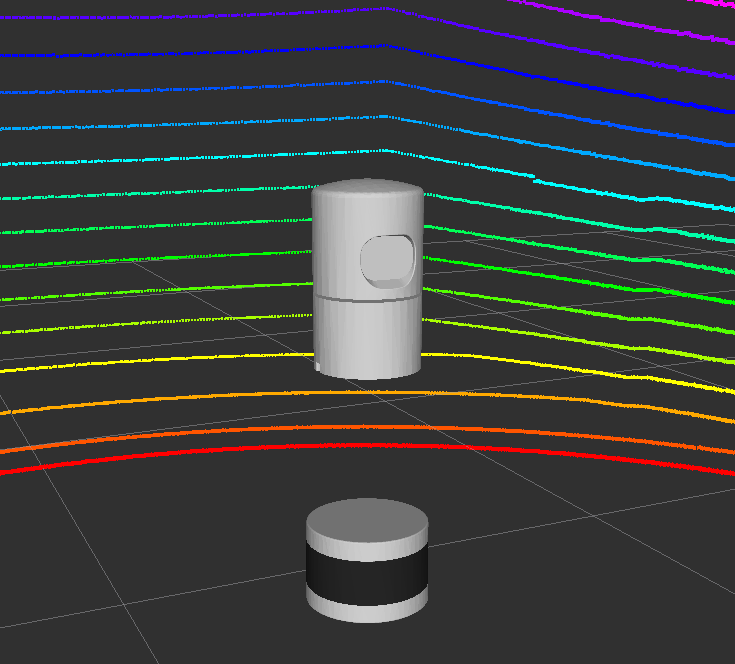
3D LiDARのセンサーモデル*
LiDARの検証としては点群を用いた距離計測を行い、岸壁に対して計測を行っています。LiDARより取得した点群をクラスタリングし、センサー正面にある点群に対する水平距離を計測し、設計通りに距離計測が行えていることが確認できました。
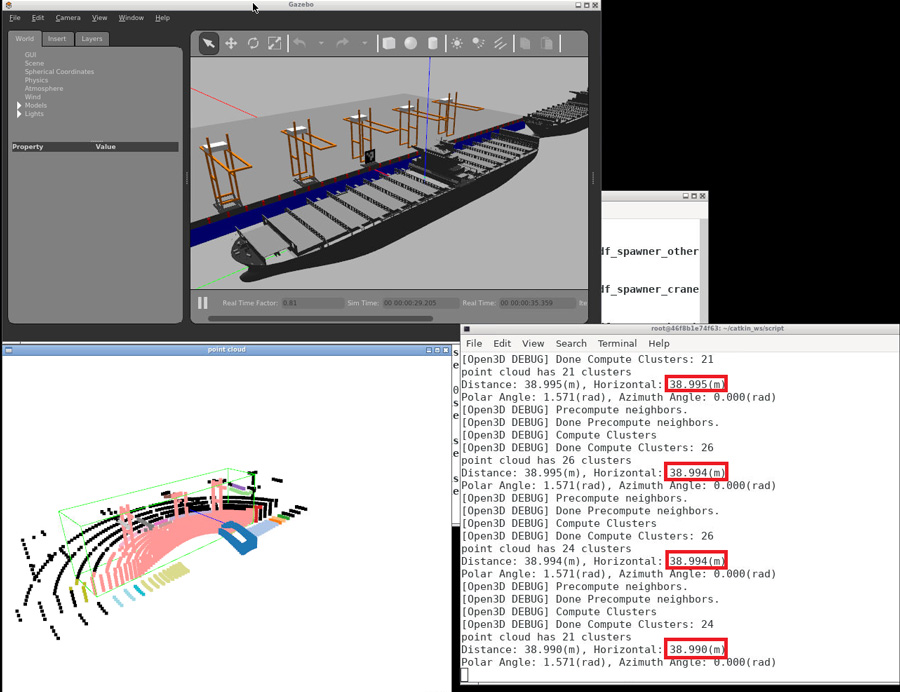
3D LiDARによる距離計測
また、カメラの検証として簡単な画像認識を行いました。岸壁上に設置した対象物を船舶モデルより認識し、緑の枠線で認識領域を示すように、検出が確認できました。
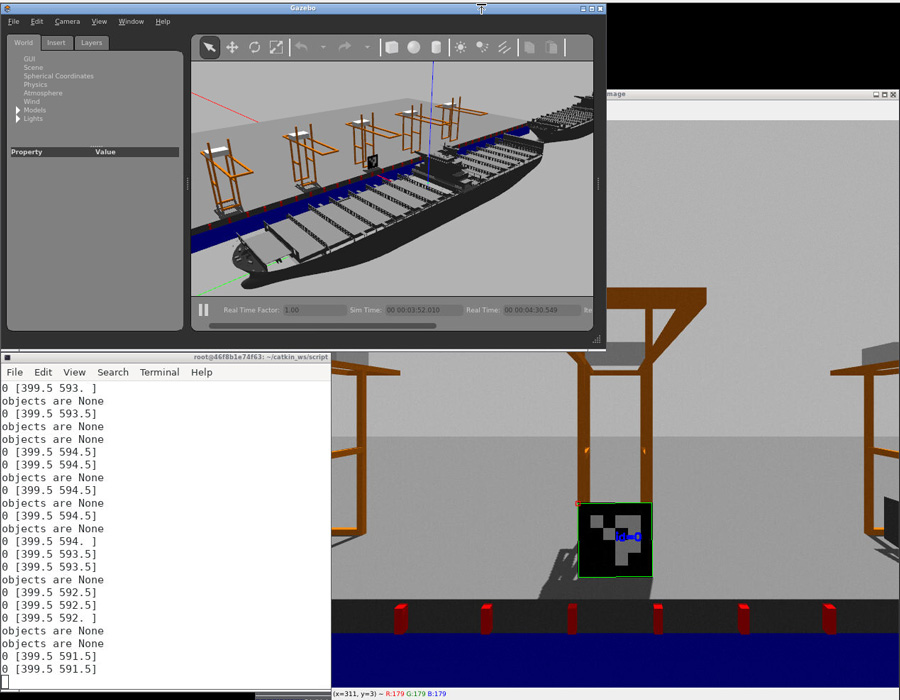
カメラによる画像認識
これらにより、シミュレーター上でカメラ・LiDARといったセンサーモデルの簡易的な検証ができることが確認できました。モデルや識別システムをより作りこむことで、現実に近い検証を繰り返し低コストで行い、洗練したものを現場で検証するといった効率化も期待されます。
今後の展開
今後、上記のシミュレーション環境において船舶モデルに複雑な動揺や現実的な運動モデルを追加し、カメラ・レーダー・GPS・LiDARによる認識の高精度化や、GPSをはじめとする他のセンサーの追加などさらなる検証を進める予定です。
(執筆担当:谷原 圭祐)
関連リンク
Monohakobi Techno Forum 2021トピック紹介資料「シミュレーションによる船舶でのLiDAR利用検討」谷原 圭祐
本件に関するお問い合わせ
お問い合わせは、こちらのメールフォームからご連絡下さい。